








Des capteurs Mems sur étagère permettent aux drones d’explorer Mars
Perseverance, la mission de la Nasa sur Mars, a donné lieu à plusieurs premières historiques, comme celle de faire voler un drone dans l’atmosphère raréfié de la planète rouge. Une prouesse technologique qui a nécessité toute une batterie de capteurs, dont des inclinomètres Mems déjà utilisés dans des applications bien terrestres.
Par Heino Härkönen, ingénieur produits pour la gamme d’accéléromètres de Murata, article adapté par Pascal Coutance
Après la réussite des récentes missions vers Mars de la part de plusieurs nations, on pourrait penser que positionner des objets à la surface d’une autre planète n’est pas vraiment si difficile. La vérité, bien sûr, est que cela s’avère toujours extrêmement complexe et repousse constamment les limites de ce que l’être humain peut réaliser.
La mission actuelle de la Nasa, Perseverance, en est un bon exemple. Elle a occasionné un certain nombre de premières historiques, comme l’atterrissage d’un rover qui a utilisé une intelligence artificielle (IA) embarquée pour décider de l’endroit exact où il allait atterrir, au fur et à mesure de sa descente. En raison des distances impliquées, tout ce qui se produit en temps réel doit être géré de manière autonome. Les améliorations apportées aux technologies autonomes renforcent ainsi notre capacité à explorer de nouveaux mondes.

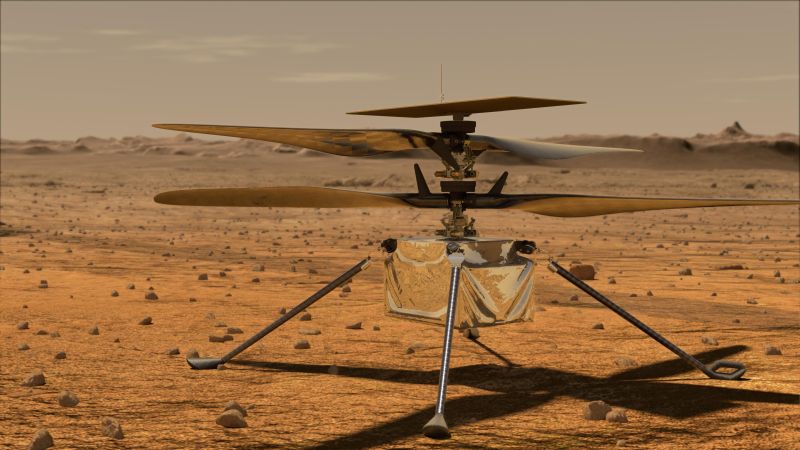
Vue d’artiste d’Ingenuity sur Mars – Crédit photo: Nasa
Une autre première consistera à ramener sur Terre les échantillons de roche que Persévérance collectera au cours de sa mission. En cas de succès, ce sera la première fois que des échantillons provenant de Mars seront examinés en utilisant toute l’étendue des connaissances scientifiques. Cette mission a également permis le tout premier vol d’un drone autonome sur Mars. L’hélicoptère Ingenuity est officiellement qualifié de véhicule de démonstration technologique. Il n’a pas de véritable mission scientifique autre que celle de voler à proximité de la surface. L’objectif est d’en apprendre le plus possible sur le vol sur Mars, afin que les futures missions puissent déployer des systèmes capables de planer au-dessus de la surface et de manœuvrer hors-sol.
Le défi de faire voler un drone sur Mars
Le fait que les successeurs d’Ingenuity voleront plutôt que rouleront est important, car le vol est un moyen beaucoup plus rapide d’aller d’un point A à un point B. Lorsque le voyage est moins important que la destination, voler prend tout son sens. Cependant, la surface de Mars ne présente pas de plates-formes d’atterrissage adaptées à un petit hélicoptère léger comme Ingenuity, qui doit donc également faire face à des conditions de surface imprévisibles.
L’hélicoptère a été conçu pour être aussi léger que possible – moins de 2 kg. Ce poids plume lui permet de réaliser un vol propulsé dans l’atmosphère raréfiée de Mars. A cause d’une densité égale à seulement 1% de celle de la Terre, les deux rotors contrarotatifs de l’hélicoptère doivent tourner à environ 2400 tr/min pour générer la portance nécessaire à son envol. Ingenuity a été développé et testé dans une atmosphère simulée au sein d’une chambre de simulation spatiale, gérée par le Jet Propulsion Laboratory (JPL) de la Nasa. Bien que le JPL n’ait pas pu simuler la force gravitationnelle beaucoup plus faible sur Mars, qui représente environ 40% de celle de la Terre, il a tout de même pu en simuler l’atmosphère. Cela a assuré aux ingénieurs que l’hélicoptère serait capable de décoller, de se mettre en vol stationnaire et de manœuvrer.
Le décollage et l’atterrissage sont les deux étapes les plus difficiles de tout vol. Pour un petit drone léger à pales rotatives comme Ingenuity, qui doit fonctionner de manière entièrement autonome, ce défi devient encore plus grand. Pour ajouter à la complexité inhérente au vol, décoller et atterrir sur une surface aussi inégale et irrégulière que Mars signifie qu’Ingenuity ne décollera probablement pas d’une surface plane, pas plus qu’il n’y atterrira. Autrement dit, il est fort peu probable qu’il décollera verticalement. Or, tout écart par rapport à la verticale pourrait faire dévier l’hélicoptère dès qu’il quitte la surface.
L’architecture GNC (guidage, navigation et contrôle) de l’hélicoptère a été conçue pour un fonctionnement autonome. Le module de guidage fournit des commandes directionnelles adaptées à la phase de vol. Le module de navigation collecte les données des capteurs embarqués et transmet ces informations aux modules de guidage et de contrôle. Le module de contrôle s’interface avec les actionneurs de l’hélicoptère. Son processeur embarqué, un Snapdragon 801 à quatre cœurs, utilise deux capteurs d’image pour assurer la navigation visuelle. Cette puissance de traitement est complétée par deux microcontrôleurs de Texas Instruments basés sur un cœur Arm Cortex-R5F, fonctionnant en parallèle pour traiter les données des capteurs et exécuter les fonctions de contrôle du vol. Un FPGA ProASIC est utilisé pour les interfaces des capteurs et des actionneurs. L’implémentation se fait dans des portes logiques plutôt que par un logiciel. Le FPGA bascule également d’un MCU à l’autre si un défaut est détecté.
Inclinomètres Mems
La suite de capteurs comprend deux unités de mesure inertielle (IMU, Inertial Measurement Unit) à 3 axes, l’une dans la partie supérieure de l’assemblage de capteurs, l’autre dans la partie inférieure. Les IMU incluent un accéléromètre et un gyroscope, chacun avec une résolution de 16 bits. Un altimètre à temps de vol (Lidar) aide au positionnement vertical, tandis qu’une caméra de navigation et une caméra RTE (return to Earth) sont également installées en partie basse de l’assemblage de capteurs.
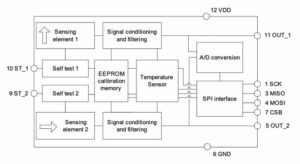
Schéma fonctionnel de l’inclinomètre SCT100T de Murata tel qu’il est utilisé sur Ingenuity – Crédit : Murata
En plus des IMU, un ECM (Electronic Core Module) comprend également un inclinomètre de Murata, le SCA100T-D02. Ce capteur Mems (micro-electromechanical system) à deux axes est utilisé pour calibrer les IMU avant le décollage, afin que l’axe vertical de l’hélicoptère puisse être mesuré avec précision. Cette étape cruciale est révélatrice du soin qu’apporte la Nasa pour assurer le succès de ses systèmes de contrôle. L’utilisation de l’inclinomètre avant le vol pour calibrer les principaux capteurs servant au GNC pendant le vol montre à quel point les étapes de décollage et d’atterrissage sont critiques pour l’hélicoptère.
La plupart des capteurs utilisés sur Ingenuity et Perseverance sont de type composants sur étagère ou COTS (Commercial Off-The-Shelf). La Nasa est aujourd’hui très ouverte à l’utilisation de composants COTS quand cela s’avère possible, ce qui inclut des capteurs conçus plus spécifiquement pour d’autres applications de haute fiabilité. Cela s’applique à l’inclinomètre Mems SCA100T qui a été développé pour offrir des performances de niveau instrumentation pour les applications de nivellement. Par ailleurs, le SCA100T a également été conçu pour résister à des chocs mécaniques allant jusqu’à 20 000 g.
L’inclinomètre comprend deux éléments de détection, positionnés orthogonalement et parallèlement au plan de montage. Le capteur utilisé dans Ingenuity affiche une plage de ± 90° avec une résolution de 0,0035°. Il génère des sorties de tension analogiques radiométriques avec une interface SPI pour le transfert des données d’inclinaison et de température, ces dernières étant fournies par le capteur de température intégré. La figure ci-dessus présente le schéma fonctionnel du SCA100T.
L’électronique de l’ECM peut supporter les températures extrêmement basses de la nuit martienne grâce à sa proximité avec la batterie, constituée d’un ensemble de six cellules lithium-ion. Des films chauffants font partie de l’assemblage de la batterie, ce qui permet de maintenir la batterie elle-même à une température d’au moins -15°C. En étant situé à proximité de l’assemblage de la batterie, l’ECM bénéficie également de ces éléments chauffants. Cela garantit que les parties sensibles du système puissent résister à des températures pouvant descendre jusqu’à -100°C. Le SCA100T supporte une température de stockage nominale comprise entre -55°C et +125°C et une température de fonctionnement entre -40°C et + 125°C.
L’angle dans les dimensions X et Y est fourni par la tension de sortie analogique, qui peut être convertie en utilisant l’équation suivante:
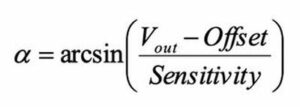
Le paramètre « Offset » correspond à la sortie pour une inclinaison de 0°, tandis que la sensibilité (« Sensitivity ») du SCA100T-D02 est de 2 V/g. Il est probable qu’Ingenuity utilise également le SCA100T pour mesurer l’inclinaison X et Y de l’hélicoptère et transmettre cette information aux IMU, pour ajouter un offset à la sortie du gyroscope. Cette opération doit être effectuée avant chaque décollage, car la surface de chaque atterrissage peut être sensiblement différente. Cela restera toujours vrai même si les véhicules ultérieurs conçus pour le vol motorisé sur Mars décollent et atterrissent de leurs propres rovers respectifs.
L’exploration de Mars représente un énorme pas en avant pour la science. Lorsque des échantillons de roche seront finalement ramenés sur Terre pour y être étudiés, ils pourront révéler des données entièrement nouvelles qui influenceront les missions ultérieures.
C’est étonnant de se rendre compte qu’une grande partie de la technologie envoyée sur Mars est, pour l’essentiel, la même technologie que celle utilisée ici, sur Terre, pour des applications similaires. Bien sûr, la plupart des environnements d’exploitation sur Terre sont beaucoup moins difficiles que sur Mars mais, de ce fait, les ingénieurs peuvent être assurés que les capteurs qu’ils choisiront pour leur application seront certainement à la hauteur de leur mission.


